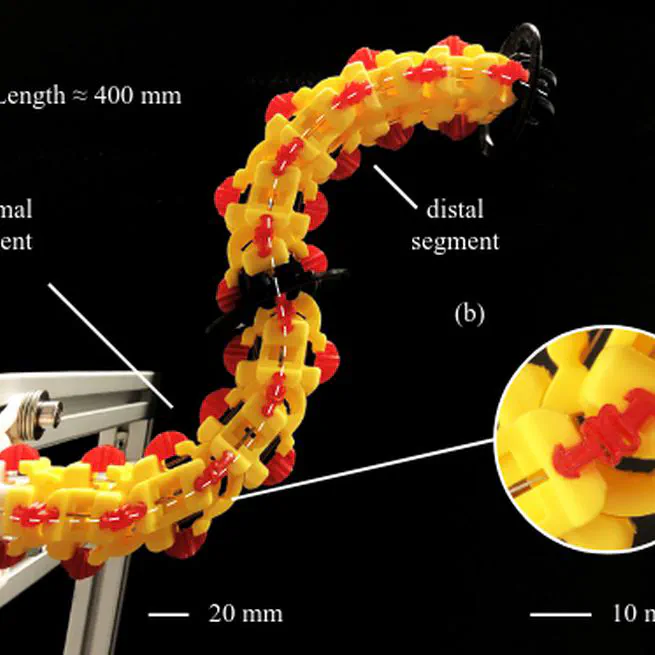
A Modular, Tendon Driven Variable Stiffness Manipulator with Internal Routing for Improved Stability and Increased Payload Capacity
Jan 1, 2024
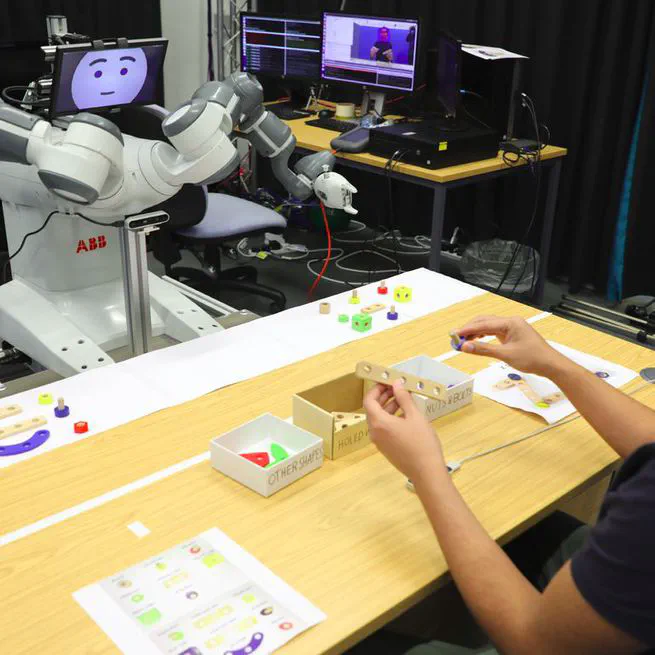
Static and Temporal Differences in Social Signals Between Error-Free and Erroneous Situations in Human-Robot Collaboration
Nov 17, 2019
A Look at Motion Planning for AVs at an Intersection
Dec 10, 2018
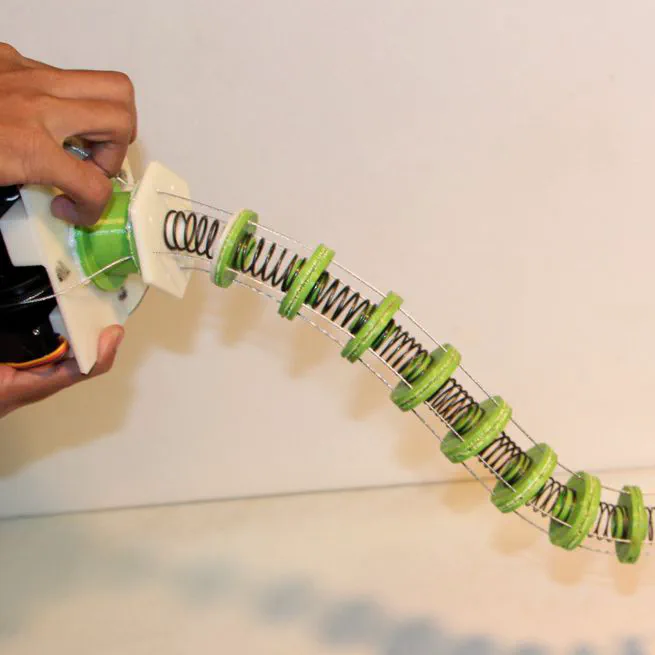
Modeling and Validation of New Continuum Robot Backbone Design With Variable Stiffness Inspired from Elephant Trunk
Oct 20, 2018